介绍
MDP(Markov Decision Process)由5元组构成\(MDP(S,A,{P_{sa}},\gamma,R)\),具体的 参数介绍如下:
- \(S\):状态集合
- \(A\):动作集合
- \(P_{sa}\):状态转移概率分布,\(P_{sa}(s')\)表示在\(s\)状态下采取 \(s\)动作,转移到\(s'\)的概率,\(P_{sa}(s')\geq0\)
- \(\gamma\):折扣系数取值范围\(0\leq\gamma\le1\)
- \(R\):回报函数,\(R:S\mapsto \mathbb{R}\)
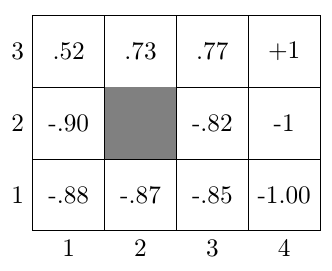
下面举一个例子来说明MDP的参数,假设一个机器人在如所描述的 网格中走动,灰色代表障碍物,当机器人走到\((4,3)\)位置将获得\(+1\)的回报,走到 \((4,2)\)位置回报为\(-1\)。
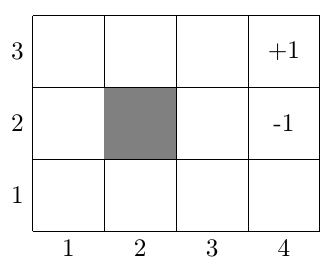
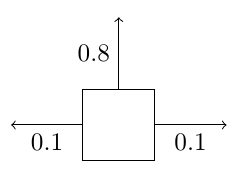
如果用MDP来描述这个例子,那么\(S\)就有\(11\)中取值,机器人可能处在除了障碍物的其他 位置;\(A\)就有\(4\)种取值,机器人可以往\({N,S,E,W}\)四个方向走;假设现在处于\([3,1]\) 位置,采取动作\(N\)(虽然命令机器人向前走,但是由于噪声的影响,可能机器人会向左 或者向右走,如),假设\(P_{[3,1]N}\)分布如下 \(P_{[3,1]N}([3,2])=0.8\),\(P_{[3,1]N}([2,1])=0.1\),\(P_{[3,1]N}([4,1])=0.1\), \(P_{[3,1]N}([1,1])=0\)等(除了相邻的位置,其他位置都无法到达,所以为\(0\));回报 函数\(R\),\(R([4,2])=-1\),\(R([4,3])=+1\),对于其他位置而言\(R(s)=-0.02\),因为当机器 人每走动一步都需要消耗电量,所以对于中间状态回报是一个比较小的负数。
对于的描述,状态的变化过程如下描述,假设\(0\)时刻状态是\(s_0\) ,然后选择一个动作\(a_0\),根据\(s\_1 \thicksim P_{s_0a_0}\)分布选择目标状态\(s_1\),再选择 动作\(a_1\),根据\(s\_2 \thicksim P_{s_1a_1}\)选择目标状态\(s_2\),依此类推状态序列。 对于这个状态变化序列,可以计算总的回报值(Total Payoff)。
初始状态是\(s_0\)的总回报定义如下,\(0\leq \gamma \le 1\):
总的回报是当前的回报,加上未来的回报,但是距离当前越远回报值权重越小,为了使得 总的回报值最大,我们需要选择一组最优动作序列\((a_0,a_1,\dots)\)使得总回报的期望最大:
最后还需要引入一个定义\(\pi\):策略\(\pi\)指的是,在给定状态选择一个动作,映射关系 为:\(S\mapsto A\)。
所以选择一个最优的动作序列,就是说要找到一个最优的\(\pi\),对于 能够求解出如的最优\(\pi\),下面的章节会解释如何求解\(\pi\)。
MDP求解
本节我们需要定义几个辅助变量:\(V^{\pi}\),\(V^*\)和\(\pi^*\),下面将逐步介绍 定义。
\(V^\pi\)
对于任意\(\pi\)都可以定义一个值函数\(V^{\pi}\)(映射关系是\(S\mapsto \mathbb{R}\)) ,\(V^{\pi}\)指的是从状态\(s\)开始并执行策略\(\pi\)之后所得到的总回报值的期望:
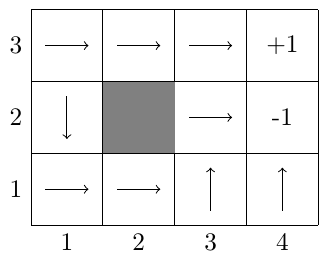
下面是一个具体的例子,如是一个\(\pi\),是与之 对应的\(V^\pi\),实际上这个策略\(\pi\)并不是非常好,因为对于很多状态执行该策略 后趋向于走到\(-1\)位置而不是\(+1\)位置。中下面两行执行的动作 使得机器人偏向走到\(-1\)位置,所以他们的总回报的期望值是负数,对于最上面一行偏向 于走到\(+1\)位置,所以总回报都是正的。所以对于下两行的位置这个策略非常差,但是 对于最上面那行这个策略就显得不错。
下面要对\(V^\pi\)做一个推导使得\(V\pi\)更容易计算,这里假设当前状态\(s\)会转移到状态 \(s'\)。中的\(P_{s\pi(s)}(s')\)描述的是\(s\)状态下采取一个动作 (这个动作由\(\pi(s)\)来确定)转移到\(s'\)状态的概率分布,因此式子中的求和描述的就 是一个求期望的过程,总回报值的期望是当前回报加上未来回报值的期望, 也称作贝尔曼方程(Bellman’s Equations)。
对于的例子,如果针对每个状态都写出方程, 那么就可以得到\(11\)个线性方程组,并且有\(11\)个未知数(每个状态都有一个\(V^pi(s)\)), 可以通过求解这个方程组得到\(V^\pi\)。按照的策略,我们可以计算 \([3,1]\)位置的\(V^\pi\):
\(V^*\) 和 \(\pi^*\)
最优值函数\(V^*(s)\)定义如下:
\(V^*(s)\)是最优值函数,值得是找到一个\(\pi\)使得对于所有的状态\(V^\pi(s)\)最大。
集合和可以得到\(V^*\)的贝尔曼方程:
根据最优值函数的贝尔曼方程,把中的常数项\(R(s)\)和 常数系数\(\gamma\)去掉(处于状态\(s\)时,对于所有的\(a\)这两个系数都相等), 就可以得到最优策略\(\pi^*(s)\)的求解公式:
由可以看出\(\pi^*(s)\)其实依赖于\(V^*(s)\),所以现在的主要目标是要想办法求解 \(V^*(s)\)。根据的定义,最直接的方法就是穷举所有的\(\pi\),但是穷举的情况会非常多 ,例如有\(11\)个状态,\(4\)个动作那么就有\(4^{11}\)种组合,搜索空间呈指数增长,不大 合理,下面将介绍值迭代(Value Iteration)和策略迭代(Policy Iteration)方法来 求解\(V^*(s)\)。
算法所描述的是值迭代的过程,初始化时对于所有的\(s\)对应的 \(V(s)\)为\(0\),接着对于每个\(V(s)\),这里的\(V(s)\)有两种更新方式。
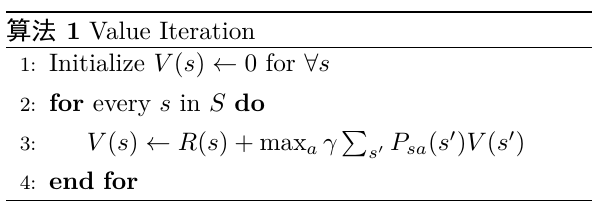
第一种是对于所有的状态计算出式子右边的部分,然后同时更新所有的\(V(s)\),这种称作 同步更新(Synchronous Update);另一种叫做异步更新(Asynchronous Update),假设我们按照固定的状态顺序更新\(V(s)\),那么首先会更新第1个状态 的\(V(s)\),接着是第2个状态的\(V(s)\)、第3个状态的\(V(s)\)、第4个状态的\(V(s)\) ,如果在更新第5个状态的\(V(s)\)用到的\(V(s')\)恰好是第1、2、3、4状态的, 那么我们使用的\(V(s')\)是前面几次迭代更新的版本。两种方法中异步更新会 收敛地稍微快一点,值迭代会使得\(V(s)\)不断地向\(V^*(s)\)接近,如 是最后求解出来的\(V^*(s)\)。
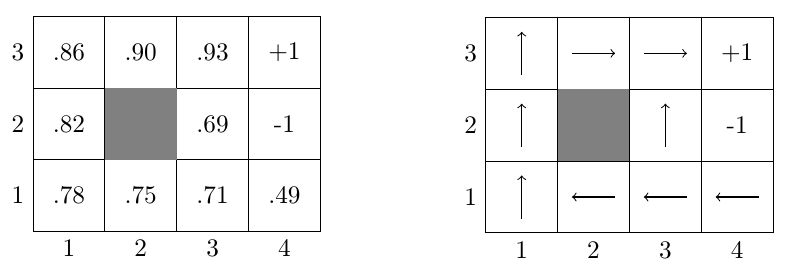
求解出\(V^*(s)\)之后,根据就可以计算\(\pi^*(s)\), 下面举一个例子计算\(\pi([3,1])\)的最优策略,结合,可以 计算出采取各个动作的未来总回报的期望,假设机器人碰到墙壁之后会回到 原来的位置,所以机器人向\(E\)走的时候有\(0.1\)的可能性会碰到墙壁然后又 返回到\([3,1]\)位置。
对比\(4\)个方向的未来总回报的期望值之后,发现采取\(E\)动作之后得到的值最大, 所以在\([3,1]\)位置会采取动作\(E\)。对每个状态都计算最优动作之后就可以得到如 所示的结果。
描述完值迭代之后,下面简单描述一下策略迭代求解\(V^*(s)\),策略迭代会使得最后 \(V(s)\)趋近于\(V^*(s)\)并且\(\pi(s)\)趋近于\(\pi^*(s)\)。
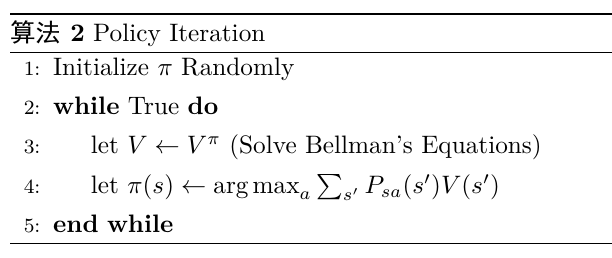
当状态数量少的时候可以采用策略迭代,因为这时候求解贝尔曼方程比较快速,但是当 状态数非常多,例如有100万个状态,那么求解贝尔曼方程的代价可能会太大,就应该 考虑使用值迭代。
这里还需要讨论一下如何求解\(P_{sa}\),一般来说可以用最大似然估计来估计。
求解过程总结
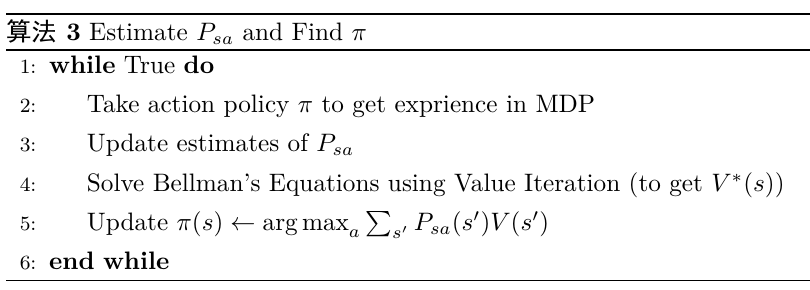
把上文提到的求解\(V^*(s)\)、\(\pi^*(s)\)和\(P_{sa}\)的方法结合起来就可以构成一个完整
的求解MDP的方法。首先采取策略\(\pi\)之后可以观测到一些状态转移的数据,用这些
数据来重新估计\(P_{sa}\),接着用值迭代的方式来求解当前\(\pi\)和\(P_{sa}\)前提
下的\(V^*(s)\)(值迭代的初始\(V(s)\)可以使用上一轮迭代的\(V^*(s)\)),
最后再利用这个\(V^*(s)\)来更新\(\pi\)。